
C13 - Crane and Embedded Control
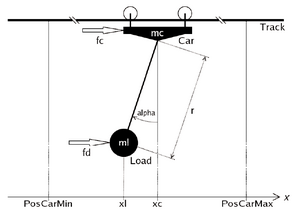
Benchmark C13 Crane with Complex Embedded Control is based on modelling and digital control of a crane crab. The discrete control is designed by means of a state space observer, and by state space control.
On modelling level, setup and handling of implicit nonlinear model descriptions are investigated, and non-linear model and linear model (linearized model) are compared. On simulation level, simulation results for nonlinear and linear dynamics without feedback control are to be compared, and two time-domain scenarios for the fully controlled nonlinear system with disturbances are investigated.
The revised definition of this benchmark underlines the educational impacts: on model level, comparison of models and integration of discrete elements are to be investigated, and on experiment level formulation of state-dependent interventions. And finally, yet importantly, the benchmark is a case study for control application: digital observer control with security interventions.